# 모델 로딩
지금까지 우리는 모델을 수동으로 만들어왔습니다. 이 방법도 괜찮지만, 폴리곤이 많은 복잡한 모델을 포함시키고 싶을 때는 정말 느립니다. 이러한 이유로, 이제 코드를 수정하여 .obj 모델 형식을 활용함으로써 Blender와 같은 소프트웨어에서 모델을 만들어 코드에 표시할 수 있도록 할 것입니다.
lib.rs 파일이 꽤 복잡해지고 있습니다. 모델 로딩 코드를 넣을 수 있도록 model.rs 파일을 만들어 보겠습니다.
// model.rs
pub trait Vertex {
fn desc() -> wgpu::VertexBufferLayout<'static>;
}
#[repr(C)]
#[derive(Copy, Clone, Debug, bytemuck::Pod, bytemuck::Zeroable)]
pub struct ModelVertex {
pub position: [f32; 3],
pub tex_coords: [f32; 2],
pub normal: [f32; 3],
}
impl Vertex for ModelVertex {
fn desc() -> wgpu::VertexBufferLayout<'static> {
todo!();
}
}
여기서 몇 가지를 발견할 수 있습니다. lib.rs에서는 Vertex를 구조체(struct)로 사용했지만, 여기서는 트레이트(trait)를 사용하고 있습니다. 우리는 여러 버텍스 타입(모델, UI, 인스턴스 데이터 등)을 가질 수 있습니다. Vertex를 트레이트로 만들면 VertexBufferLayout 생성 코드를 추상화하여 RenderPipeline을 더 간단하게 만들 수 있습니다.
또 다른 점은 ModelVertex의 normal 필드입니다. 이 필드는 조명에 대해 이야기할 때까지 사용하지 않겠지만, 지금은 구조체에 추가해 두겠습니다.
이제 VertexBufferLayout을 정의해 봅시다.
impl Vertex for ModelVertex {
fn desc() -> wgpu::VertexBufferLayout<'static> {
use std::mem;
wgpu::VertexBufferLayout {
array_stride: mem::size_of::<ModelVertex>() as wgpu::BufferAddress,
step_mode: wgpu::VertexStepMode::Vertex,
attributes: &[
wgpu::VertexAttribute {
offset: 0,
shader_location: 0,
format: wgpu::VertexFormat::Float32x3,
},
wgpu::VertexAttribute {
offset: mem::size_of::<[f32; 3]>() as wgpu::BufferAddress,
shader_location: 1,
format: wgpu::VertexFormat::Float32x2,
},
wgpu::VertexAttribute {
offset: mem::size_of::<[f32; 5]>() as wgpu::BufferAddress,
shader_location: 2,
format: wgpu::VertexFormat::Float32x3,
},
],
}
}
}
이 코드는 기본적으로 원래의 VertexBufferLayout과 동일하지만, normal을 위한 VertexAttribute를 추가했습니다. lib.rs에 있던 Vertex 구조체는 더 이상 필요 없으므로 삭제하고, RenderPipeline을 위해 model의 새로운 Vertex를 사용하세요.
또한, 직접 만들었던 vertex_buffer, index_buffer, num_indices도 제거할 것입니다.
let render_pipeline = device.create_render_pipeline(&wgpu::RenderPipelineDescriptor {
// ...
vertex: wgpu::VertexState {
// ...
buffers: &[model::ModelVertex::desc(), InstanceRaw::desc()],
},
// ...
});
desc 메서드는 Vertex 트레이트에 구현되어 있으므로, 이 메서드에 접근하려면 먼저 트레이트를 가져와야(import) 합니다. 파일 상단의 다른 use문과 함께 추가해주세요.
use model::Vertex;
이 모든 것이 준비되었으니, 이제 렌더링할 모델이 필요합니다. 이미 가지고 있다면 좋지만, 없다면 모델과 모든 텍스처가 포함된 zip 파일 (opens new window)을 제공해 드립니다. 이 모델을 기존 src 폴더 옆에 새로운 res 폴더를 만들어 그 안에 넣을 것입니다.
# res 폴더의 파일에 접근하기
Cargo가 우리 프로그램을 빌드하고 실행할 때, 현재 작업 디렉토리(current working directory)라는 것을 설정합니다. 이 디렉토리에는 보통 프로젝트의 루트 Cargo.toml이 포함됩니다. res 폴더의 경로는 프로젝트 구조에 따라 달라질 수 있습니다. 이 튜토리얼의 예제 코드에서 res 폴더는 code/beginner/tutorial9-models/res/에 있습니다. 모델을 로드할 때 이 경로를 사용하고 cube.obj를 덧붙일 수 있습니다. 이것도 괜찮지만, 프로젝트 구조를 변경하면 코드가 깨질 것입니다.
이 문제를 해결하기 위해, 빌드 스크립트를 수정하여 Cargo가 실행 파일을 만드는 위치에 res 폴더를 복사하고, 거기서부터 참조하도록 할 것입니다. build.rs라는 파일을 만들고 다음을 추가하세요.
use anyhow::*;
use fs_extra::copy_items;
use fs_extra::dir::CopyOptions;
use std::env;
fn main() -> Result<()> {
// 이 줄은 /res/ 폴더에 변경 사항이 있을 경우 Cargo에게 이 스크립트를 다시 실행하라고 알립니다.
println!("cargo:rerun-if-changed=res/*");
let out_dir = env::var("OUT_DIR")?;
let mut copy_options = CopyOptions::new();
copy_options.overwrite = true;
let mut paths_to_copy = Vec::new();
paths_to_copy.push("res/");
copy_items(&paths_to_copy, out_dir, ©_options)?;
Ok(())
}
build.rs를 Cargo.toml과 같은 폴더에 두어야 합니다. 그렇지 않으면 Cargo가 크레이트를 빌드할 때 실행하지 않습니다.
OUT_DIR은 Cargo가 애플리케이션이 빌드될 위치를 지정하는 데 사용하는 환경 변수입니다.
이것이 제대로 작동하려면 Cargo.toml을 수정해야 합니다. [dependencies] 블록 아래에 다음을 추가하세요.
[build-dependencies]
anyhow = "1.0"
fs_extra = "1.2"
glob = "0.3"
# WASM에서 파일에 접근하기
설계상, 웹 어셈블리(Web Assembly)에서는 사용자 파일 시스템의 파일에 접근할 수 없습니다. 대신, 웹 서버를 사용해 해당 파일들을 제공하고 HTTP 요청을 통해 코드 안으로 로드할 것입니다. 이를 단순화하기 위해, 이 작업을 처리할 resources.rs라는 파일을 만들어 봅시다. 각각 텍스트 파일과 바이너리 파일을 로드하는 두 개의 함수를 만들 것입니다.
use std::io::{BufReader, Cursor};
use wgpu::util::DeviceExt;
use crate::{model, texture};
#[cfg(target_arch = "wasm32")]
fn format_url(file_name: &str) -> reqwest::Url {
let window = web_sys::window().unwrap();
let location = window.location();
let mut origin = location.origin().unwrap();
if !origin.ends_with("learn-wgpu") {
origin = format!("{}/learn-wgpu", origin);
}
let base = reqwest::Url::parse(&format!("{}/", origin,)).unwrap();
base.join(file_name).unwrap()
}
pub async fn load_string(file_name: &str) -> anyhow::Result<String> {
#[cfg(target_arch = "wasm32")]
let txt = {
let url = format_url(file_name);
reqwest::get(url).await?.text().await?
};
#[cfg(not(target_arch = "wasm32"))]
let txt = {
let path = std::path::Path::new(env!("OUT_DIR"))
.join("res")
.join(file_name);
std::fs::read_to_string(path)?
};
Ok(txt)
}
pub async fn load_binary(file_name: &str) -> anyhow::Result<Vec<u8>> {
#[cfg(target_arch = "wasm32")]
let data = {
let url = format_url(file_name);
reqwest::get(url).await?.bytes().await?.to_vec()
};
#[cfg(not(target_arch = "wasm32"))]
let data = {
let path = std::path::Path::new(env!("OUT_DIR"))
.join("res")
.join(file_name);
std::fs::read(path)?
};
Ok(data)
}
데스크톱에서는 OUT_DIR을 사용하여 res 폴더에 접근하고 있습니다.
WASM 사용 시 요청을 처리하기 위해 reqwest (opens new window)를 사용하고 있습니다. Cargo.toml에 다음을 추가하세요:
[target.'cfg(target_arch = "wasm32")'.dependencies]
# 다른 의존성들
reqwest = { version = "0.11" }
또한 web-sys에 Location 기능을 추가해야 합니다:
web-sys = { version = "0.3", features = [
"Document",
"Window",
"Element",
"Location",
]}
lib.rs에 resources를 모듈로 추가하는 것을 잊지 마세요:
mod resources;
# TOBJ로 모델 로딩하기
tobj (opens new window) 라이브러리를 사용하여 모델을 로드할 것입니다. Cargo.toml에 추가해 봅시다.
[dependencies]
# 다른 의존성들...
tobj = { version = "3.2", default-features = false, features = ["async"]}
하지만 모델을 로드하기 전에, 그것을 담을 공간이 필요합니다.
// model.rs
pub struct Model {
pub meshes: Vec<Mesh>,
pub materials: Vec<Material>,
}
Model 구조체에는 meshes와 materials를 위한 Vec이 있습니다. 이는 .obj 파일이 여러 메쉬와 머티리얼을 포함할 수 있기 때문에 중요합니다. 아직 Mesh와 Material 클래스를 만들어야 하므로, 이제 그것들을 만들어 봅시다.
pub struct Material {
pub name: String,
pub diffuse_texture: texture::Texture,
pub bind_group: wgpu::BindGroup,
}
pub struct Mesh {
pub name: String,
pub vertex_buffer: wgpu::Buffer,
pub index_buffer: wgpu::Buffer,
pub num_elements: u32,
pub material: usize,
}
Material은 꽤 간단합니다. 이름과 하나의 텍스처로 이루어져 있습니다. 우리의 큐브 obj는 실제로 두 개의 텍스처를 가지고 있지만, 하나는 노멀 맵이며, 그것은 나중에 다룰 것입니다. 이름은 주로 디버깅 목적으로 사용됩니다.
텍스처 이야기가 나왔으니, resources.rs에 Texture를 로드하는 함수를 추가해야 합니다.
pub async fn load_texture(
file_name: &str,
device: &wgpu::Device,
queue: &wgpu::Queue,
) -> anyhow::Result<texture::Texture> {
let data = load_binary(file_name).await?;
texture::Texture::from_bytes(device, queue, &data, file_name)
}
load_texture 메서드는 모델의 텍스처를 로드할 때 유용할 것입니다. include_bytes!는 컴파일 타임에 파일 이름을 알아야 하는데, 모델 텍스처의 경우 이를 보장할 수 없기 때문입니다.
Mesh는 버텍스 버퍼, 인덱스 버퍼, 그리고 메쉬의 인덱스 수를 가지고 있습니다. 머티리얼에는 usize를 사용합니다. 이 usize는 그릴 때가 되면 materials 리스트의 인덱스로 사용될 것입니다.
이제 모든 준비가 끝났으니, 모델을 로드해 봅시다.
use std::io::{BufReader, Cursor};
pub async fn load_model(
file_name: &str,
device: &wgpu::Device,
queue: &wgpu::Queue,
layout: &wgpu::BindGroupLayout,
) -> anyhow::Result<model::Model> {
let obj_text = crate::resources::load_string(file_name).await?;
let obj_cursor = Cursor::new(obj_text);
let mut obj_reader = BufReader::new(obj_cursor);
let (models, obj_materials) = tobj::load_obj_buf_async(
&mut obj_reader,
&tobj::LoadOptions {
triangulate: true,
single_index: true,
..Default::default()
},
|p| async move {
let mat_text = crate::resources::load_string(&p).await.unwrap();
tobj::load_mtl_buf(&mut BufReader::new(Cursor::new(mat_text)))
},
)
.await?;
let mut materials = Vec::new();
for m in obj_materials? {
let diffuse_texture =
crate::resources::load_texture(&m.diffuse_texture.unwrap(), device, queue).await?;
let bind_group = device.create_bind_group(&wgpu::BindGroupDescriptor {
layout,
entries: &[
wgpu::BindGroupEntry {
binding: 0,
resource: wgpu::BindingResource::TextureView(&diffuse_texture.view),
},
wgpu::BindGroupEntry {
binding: 1,
resource: wgpu::BindingResource::Sampler(&diffuse_texture.sampler),
},
],
label: None,
});
materials.push(model::Material {
name: m.name,
diffuse_texture,
bind_group,
})
}
let meshes = models
.into_iter()
.map(|m| {
let vertices = (0..m.mesh.positions.len() / 3)
.map(|i| {
model::ModelVertex {
position: [
m.mesh.positions[i * 3],
m.mesh.positions[i * 3 + 1],
m.mesh.positions[i * 3 + 2],
],
tex_coords: [m.mesh.texcoords[i * 2], 1.0 - m.mesh.texcoords[i * 2 + 1]],
normal: [
m.mesh.normals[i * 3],
m.mesh.normals[i * 3 + 1],
m.mesh.normals[i * 3 + 2],
],
}
})
.collect::<Vec<_>>();
let vertex_buffer = device.create_buffer_init(&wgpu::util::BufferInitDescriptor {
label: Some(&format!("{:?} Vertex Buffer", file_name)),
contents: bytemuck::cast_slice(&vertices),
usage: wgpu::BufferUsages::VERTEX,
});
let index_buffer = device.create_buffer_init(&wgpu::util::BufferInitDescriptor {
label: Some(&format!("{:?} Index Buffer", file_name)),
contents: bytemuck::cast_slice(&m.mesh.indices),
usage: wgpu::BufferUsages::INDEX,
});
model::Mesh {
name: file_name.to_string(),
vertex_buffer,
index_buffer,
num_elements: m.mesh.indices.len() as u32,
material: m.mesh.material_id.unwrap_or(0),
}
})
.collect::<Vec<_>>();
Ok(model::Model { meshes, materials })
}
역자 주: 위 코드에서 m.diffuse_texture는 Option<String> 타입일 수 있으므로 .unwrap()을 추가해야 할 수 있습니다. 또한 m.mesh.normals가 비어있을 경우를 대비하여 if/else 분기를 추가하는 것이 안전합니다.
// 수정 제안
let vertices = (0..m.mesh.positions.len() / 3)
.map(|i| {
if m.mesh.normals.is_empty() {
model::ModelVertex {
position: [
m.mesh.positions[i * 3],
m.mesh.positions[i * 3 + 1],
m.mesh.positions[i * 3 + 2],
],
tex_coords: [m.mesh.texcoords[i * 2], 1.0 - m.mesh.texcoords[i * 2 + 1]],
normal: [0.0, 0.0, 0.0],
}
} else {
model::ModelVertex {
position: [
m.mesh.positions[i * 3],
m.mesh.positions[i * 3 + 1],
m.mesh.positions[i * 3 + 2],
],
tex_coords: [m.mesh.texcoords[i * 2], 1.0 - m.mesh.texcoords[i * 2 + 1]],
normal: [
m.mesh.normals[i * 3],
m.mesh.normals[i * 3 + 1],
m.mesh.normals[i * 3 + 2],
],
}
}
})
.collect::<Vec<_>>();
# 메쉬 렌더링하기
모델을 그리기 전에, 개별 메쉬를 그릴 수 있어야 합니다. DrawModel이라는 트레이트를 만들고 RenderPass에 대해 구현해 봅시다.
// model.rs
use std::ops::Range;
//... 다른 struct 정의들
pub trait DrawModel<'a> {
fn draw_mesh(&mut self, mesh: &'a Mesh);
fn draw_mesh_instanced(
&mut self,
mesh: &'a Mesh,
instances: Range<u32>,
);
}
impl<'a, 'b> DrawModel<'b> for wgpu::RenderPass<'a>
where
'b: 'a,
{
fn draw_mesh(&mut self, mesh: &'b Mesh) {
self.draw_mesh_instanced(mesh, 0..1);
}
fn draw_mesh_instanced(
&mut self,
mesh: &'b Mesh,
instances: Range<u32>,
){
self.set_vertex_buffer(0, mesh.vertex_buffer.slice(..));
self.set_index_buffer(mesh.index_buffer.slice(..), wgpu::IndexFormat::Uint32);
self.draw_indexed(0..mesh.num_elements, 0, instances);
}
}
이 메서드들을 impl Model에 넣을 수도 있었지만, 렌더링이 RenderPass의 역할이므로, RenderPass가 모든 렌더링을 수행하는 것이 더 합리적이라고 생각했습니다. 하지만 이것은 렌더링할 때 DrawModel을 가져와야 한다는 것을 의미합니다.
vertex_buffer 등을 제거했을 때, render_pass 설정도 함께 제거했습니다.
// lib.rs
render_pass.set_vertex_buffer(1, self.instance_buffer.slice(..));
render_pass.set_pipeline(&self.render_pipeline);
render_pass.set_bind_group(0, &self.diffuse_bind_group, &[]);
render_pass.set_bind_group(1, &self.camera_bind_group, &[]);
use model::DrawModel;
render_pass.draw_mesh_instanced(&self.obj_model.meshes[0], 0..self.instances.len() as u32);
하지만 그 전에, 모델을 로드하고 State에 저장해야 합니다. State::new()에 다음을 넣으세요.
let obj_model =
resources::load_model("cube.obj", &device, &queue, &texture_bind_group_layout)
.await
.unwrap();
새 모델은 이전 모델보다 약간 크므로 인스턴스 간의 간격을 조정해야 합니다.
const SPACE_BETWEEN: f32 = 3.0;
let instances = (0..NUM_INSTANCES_PER_ROW).flat_map(|z| {
(0..NUM_INSTANCES_PER_ROW).map(move |x| {
let x = SPACE_BETWEEN * (x as f32 - NUM_INSTANCES_PER_ROW as f32 / 2.0);
let z = SPACE_BETWEEN * (z as f32 - NUM_INSTANCES_PER_ROW as f32 / 2.0);
let position = cgmath::Vector3 { x, y: 0.0, z };
let rotation = if position.is_zero() {
cgmath::Quaternion::from_axis_angle(cgmath::Vector3::unit_z(), cgmath::Deg(0.0))
} else {
cgmath::Quaternion::from_axis_angle(position.normalize(), cgmath::Deg(45.0))
};
Instance {
position, rotation,
}
})
}).collect::<Vec<_>>();
이 모든 작업을 마치면 다음과 같은 결과물을 얻게 됩니다.
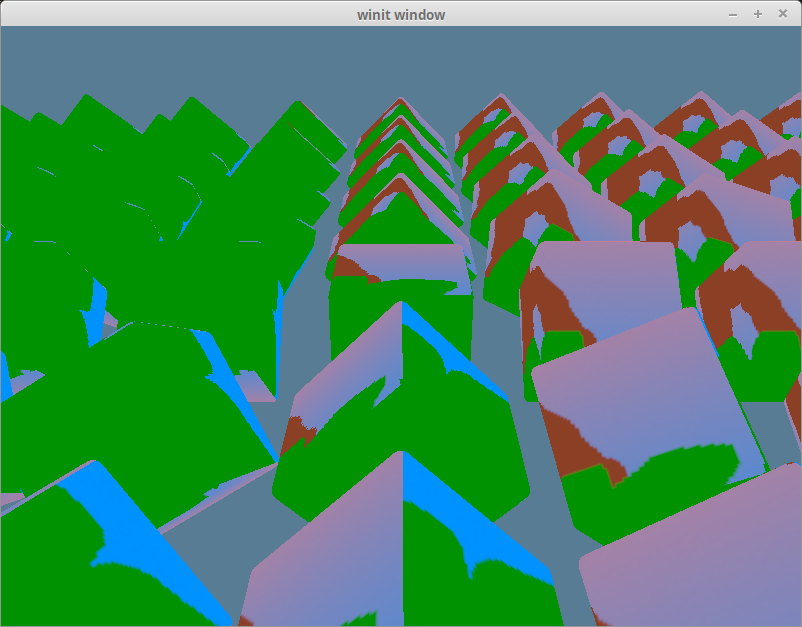
# 올바른 텍스처 사용하기
obj의 텍스처 파일을 보면, 우리 obj와 일치하지 않는다는 것을 알 수 있습니다. 우리가 보고 싶은 텍스처는 이것입니다.

하지만 우리는 여전히 행복한 나무 텍스처를 보고 있습니다.
그 이유는 매우 간단합니다. 텍스처는 만들었지만, RenderPass에 전달할 바인드 그룹을 만들지 않았기 때문입니다. 우리는 여전히 오래된 diffuse_bind_group을 사용하고 있습니다. 이를 변경하려면, 우리 머티리얼의 바인드 그룹, 즉 Material 구조체의 bind_group 멤버를 사용해야 합니다.
DrawModel에 머티리얼 파라미터를 추가할 것입니다.
pub trait DrawModel<'a> {
fn draw_mesh(&mut self, mesh: &'a Mesh, material: &'a Material, camera_bind_group: &'a wgpu::BindGroup);
fn draw_mesh_instanced(
&mut self,
mesh: &'a Mesh,
material: &'a Material,
instances: Range<u32>,
camera_bind_group: &'a wgpu::BindGroup,
);
}
impl<'a, 'b> DrawModel<'b> for wgpu::RenderPass<'a>
where
'b: 'a,
{
fn draw_mesh(&mut self, mesh: &'b Mesh, material: &'b Material, camera_bind_group: &'b wgpu::BindGroup) {
self.draw_mesh_instanced(mesh, material, 0..1, camera_bind_group);
}
fn draw_mesh_instanced(
&mut self,
mesh: &'b Mesh,
material: &'b Material,
instances: Range<u32>,
camera_bind_group: &'b wgpu::BindGroup,
) {
self.set_vertex_buffer(0, mesh.vertex_buffer.slice(..));
self.set_index_buffer(mesh.index_buffer.slice(..), wgpu::IndexFormat::Uint32);
self.set_bind_group(0, &material.bind_group, &[]);
self.set_bind_group(1, camera_bind_group, &[]);
self.draw_indexed(0..mesh.num_elements, 0, instances);
}
}
이를 반영하여 렌더링 코드를 변경해야 합니다.
render_pass.set_vertex_buffer(1, self.instance_buffer.slice(..));
render_pass.set_pipeline(&self.render_pipeline);
let mesh = &self.obj_model.meshes[0];
let material = &self.obj_model.materials[mesh.material];
render_pass.draw_mesh_instanced(mesh, material, 0..self.instances.len() as u32, &self.camera_bind_group);
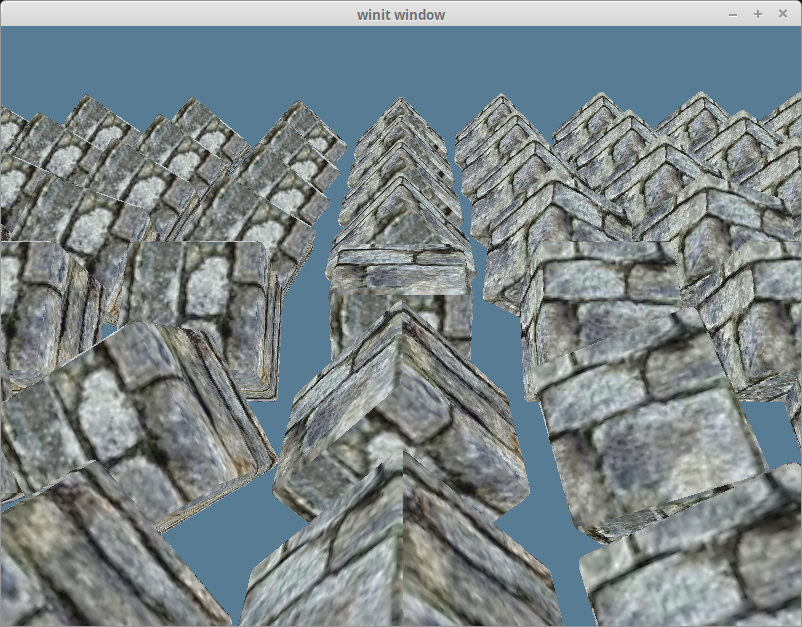
이 모든 것을 적용하면 다음과 같은 결과를 얻을 수 있습니다.
# 전체 모델 렌더링하기
현재 우리는 메쉬와 머티리얼을 직접 지정하고 있습니다. 이것은 다른 머티리얼로 메쉬를 그리고 싶을 때 유용합니다. 또한 모델의 다른 부분(만약 있다면)은 렌더링하고 있지 않습니다. 이제 DrawModel에 모델의 모든 부분을 각자의 머티리얼로 그리는 메서드를 만들어 봅시다.
pub trait DrawModel<'a> {
// ...
fn draw_model(&mut self, model: &'a Model, camera_bind_group: &'a wgpu::BindGroup);
fn draw_model_instanced(
&mut self,
model: &'a Model,
instances: Range<u32>,
camera_bind_group: &'a wgpu::BindGroup,
);
}
impl<'a, 'b> DrawModel<'b> for wgpu::RenderPass<'a>
where
'b: 'a, {
// ...
fn draw_model(&mut self, model: &'b Model, camera_bind_group: &'b wgpu::BindGroup) {
self.draw_model_instanced(model, 0..1, camera_bind_group);
}
fn draw_model_instanced(
&mut self,
model: &'b Model,
instances: Range<u32>,
camera_bind_group: &'b wgpu::BindGroup,
) {
for mesh in &model.meshes {
let material = &model.materials[mesh.material];
self.draw_mesh_instanced(mesh, material, instances.clone(), camera_bind_group);
}
}
}
lib.rs의 코드도 그에 맞게 변경될 것입니다.
render_pass.set_vertex_buffer(1, self.instance_buffer.slice(..));
render_pass.set_pipeline(&self.render_pipeline);
render_pass.draw_model_instanced(&self.obj_model, 0..self.instances.len() as u32, &self.camera_bind_group);